หุ่นยนต์ร่วมมือ TI5ROBOT


"วิสัยทัศน์ Ti5robot" อิงตามโซลูชันการจัดหาฮาร์ดแวร์หุ่นยนต์อัจฉริยะ ขับเคลื่อนด้วยนวัตกรรมอัจฉริยะ และได้รับคำแนะนำจากฝ่ายวิจัยและพัฒนา การผลิต และการผลิตอุปกรณ์หุ่นยนต์ให้บริการลูกค้าด้วยฮาร์ดแวร์หุ่นยนต์อัจฉริยะและโซลูชั่นเทคโนโลยีการควบคุมประสาทสัมผัสร่างกายที่คุ้มค่าคุ้มราคา พร้อมทั้งส่งออกและสร้างมูลค่าอย่างต่อเนื่อง
บริการที่กำหนดเอง
แก้ไขปัญหาที่เครื่องจักรมาตรฐานตามท้องตลาดไม่สามารถตอบสนองความต้องการของลูกค้าได้
บันทึกวงจรการพัฒนาผลิตภัณฑ์สำหรับลูกค้าบรรเทาปัญหาการขาดแคลนความสามารถทางเทคนิคด้านฮาร์ดแวร์สำหรับลูกค้า
สุดยอด การทำงานร่วมกัน แย่เลย
ในฐานะหุ่นยนต์อัจฉริยะรูปแบบใหม่ หุ่นยนต์ตัวนี้มีความมุ่งมั่นในการขจัดอุปสรรคของความร่วมมือระหว่างมนุษย์และเครื่องจักร
ปล่อยให้หุ่นยนต์กำจัดห่วงราวกั้นหรือกรงให้หมด
| พารามิเตอร์พื้นฐาน | Ti5 แขนหุ่นยนต์-3 |
| น้ำหนัก | 9.2กก |
| เพย์โหลด | 3กก |
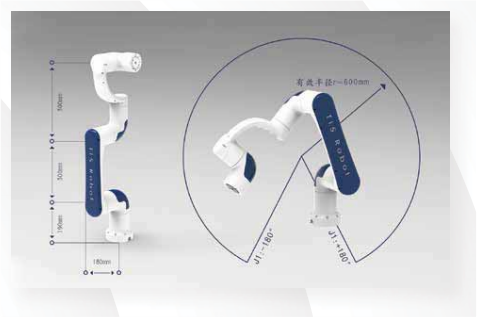
| รัศมีการทำงาน | 600มม |
| ความแม่นยำในการระบุตำแหน่งซ้ำ | 0.05มม |
| เสรีภาพ | 6 |
| การใช้พลังงานโดยทั่วไป | 160w |
| อินเตอร์เฟซที่มีการควบคุม | การควบคุม ROS, การควบคุม PYBULLET, การควบคุมราสเบอร์รี่พาย, การควบคุม PYTHON, การควบคุม C ++ การออกแบบโมดูลาร์ ถอดและประกอบง่าย เซอร์โวมอเตอร์ + ตัวลดฮาร์มอนิก |
| เครื่องจักรไฟฟ้า | มอเตอร์แรงบิดที่ยืดหยุ่น+ตัวลดฮาร์มอนิก |
| แหล่งจ่ายไฟหลัก | 24-48V |
| ช่วงร่วม | J1(+/-180。)J2(-265。~85。)J3(+/-150。) J4(+/-180。)J5(+/-175。)J6(+/-175。) |
| วัสดุ | อลูมิเนียมอัลลอยด์ เรซิน |
| สภาพแวดล้อมในการทำงาน | 0.C - 50.C |
| แหล่งจ่ายกระแสไฟฟ้า | กระแสตรง 48V,5A;กระแสตรง 24V,5A |
| พารามิเตอร์มอเตอร์ | ข้อต่อแบบรวมของหุ่นยนต์ฮาร์มอนิกกลวง |
| บลูทู ธ | 4.2 |
| ยูเอสบี | 4 |
| HDMI | 1 |
| อินเทอร์เฟซไอโอ | 4 |
| สวิตช์ฉุกเฉิน | 1 |





