มือจับสามารถแบ่งออกได้เป็นหลายประเภท รวมถึงแบบไฟฟ้าและนิวแมติกแล้วมือจับแบบไฟฟ้าและมือจับแบบนิวแมติกแตกต่างกันอย่างไร?
1: มือจับอุตสาหกรรมคืออะไร
มือจับสำหรับงานอุตสาหกรรมเรียกอีกอย่างว่ากลไกของมือจับเชิงกลกลไกของมือจับหุ่นยนต์ได้รับการออกแบบตามความต้องการในการทำงานจริงและมีรูปแบบต่างๆ
มือจับแบบกลไกโดยทั่วไปคือมือจับแบบสองนิ้ว ซึ่งมีลักษณะพิเศษคือคุณสมบัติการเคลื่อนที่ การจับ และกลไกต่อไป เรามาพูดถึงประเด็นสำคัญบางประการกันกลไกหนึ่งคือกลไกการหนีบปลายแบบนิวแมติกซึ่งมีคุณลักษณะพิเศษคือความเร็วในการดำเนินการที่รวดเร็วมาก ความลื่นไหลมาจากระบบไฮดรอลิก การสูญเสียแรงดันค่อนข้างน้อย และเหมาะสำหรับการควบคุมระยะไกลประการที่สองคือกลไกการหนีบปลายด้านดูดซึ่งใช้แรงดูดของถ้วยดูดเพื่อเคลื่อนย้ายวัตถุส่วนใหญ่จะเหมาะสำหรับวัตถุที่มีอัตราส่วนลักษณะและความหนาเพิ่มขึ้นปานกลาง เช่น แก้ว กระดาษ เป็นต้น วิธีหนึ่งคือกลไกการแคลมป์ปลายไฮดรอลิกที่ยึดวัตถุโดยใช้แคลมป์ไฮดรอลิกและการปล่อยสปริงแต่ท้ายที่สุดแล้ว กรงเล็บของหุ่นยนต์อุตสาหกรรมสามารถช่วยให้เราทำงานได้ดีขึ้น
2. ความแตกต่างระหว่างมือจับไฟฟ้าและมือจับแบบนิวแมติก
เมื่อเปรียบเทียบกับมือจับแบบใช้ลม การใช้งานมือจับไฟฟ้าในด้านระบบอัตโนมัติทางอุตสาหกรรมมีลักษณะดังต่อไปนี้:
1) ประเภทมอเตอร์ไฟฟ้ามีกลไกการล็อคตัวเองซึ่งสามารถป้องกันไม่ให้อุปกรณ์ชิ้นงานเสียหายจากไฟฟ้าขัดข้องเมื่อเทียบกับมือจับแบบใช้ลมจะปลอดภัยกว่า
2) กริปเปอร์ไฟฟ้ามีฟังก์ชั่นการควบคุมที่ตั้งโปรแกรมได้เพื่อให้ได้ตำแหน่งหลายจุดมือจับแบบนิวแมติกจะมีจุดหยุดเพียงสองจุด ในขณะที่มือจับแบบไฟฟ้าจะมีจุดหยุดได้มากกว่า 256 จุดสามารถควบคุมความเร่งและลดความเร็วของนิ้วไฟฟ้าได้เพื่อลดผลกระทบต่อชิ้นงาน
3) มือจับไฟฟ้าเป็นมือจับแบบยืดหยุ่นที่สามารถควบคุมแรงได้อย่างแม่นยำ ในขณะที่มือจับแบบนิวแมติกเป็นกระบวนการสั่นโดยหลักการแล้วมีการแกว่งซึ่งยากจะกำจัดออกไปแรงจับยึดของมือจับไฟฟ้าสามารถปรับได้เพื่อให้เกิดการควบคุมแรงแบบวงปิดความแม่นยำของแรงจับยึดสามารถเข้าถึง 0.01N และความแม่นยำในการวัดสามารถเข้าถึง 0.005 มม.ความแข็งแรงและความเร็วของมือจับแบบนิวแมติกโดยทั่วไปไม่สามารถควบคุมได้ ดังนั้นจึงไม่สามารถใช้สำหรับงานละเอียดที่มีความยืดหยุ่นสูงได้
4) ปริมาตรของมือจับไฟฟ้ามีขนาดเล็กกว่าของมือจับแบบนิวแมติกมากนอกจากนี้ยังสะดวกในการติดตั้งอีกด้วยการบำรุงรักษาทำได้ง่าย
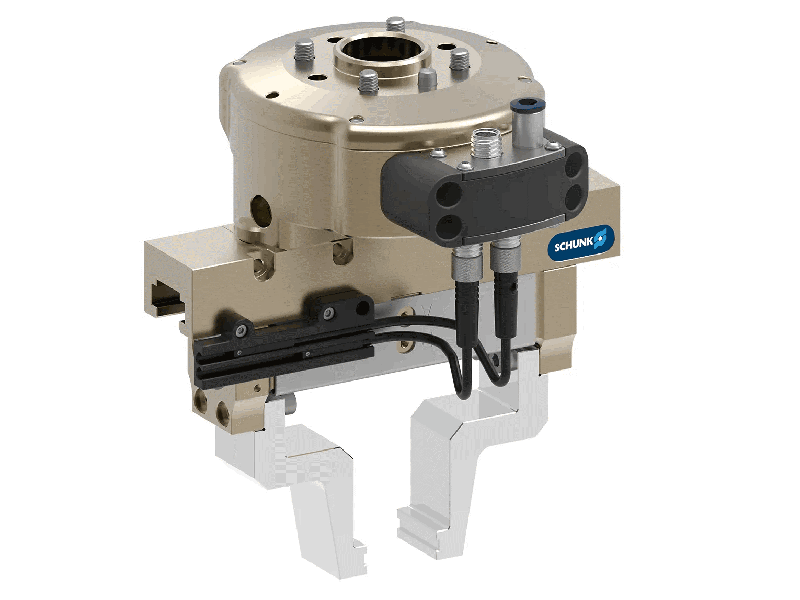
กริปเปอร์แบบนิวแมติก
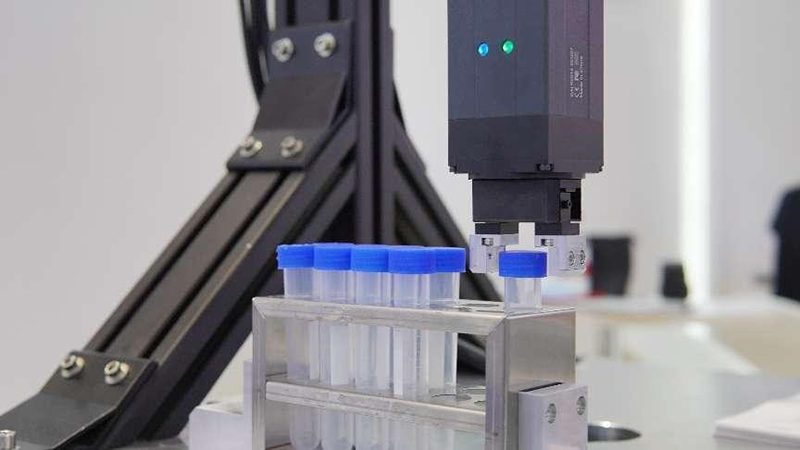 กริปเปอร์ไฟฟ้า
กริปเปอร์ไฟฟ้า
3. ข้อดีของมือจับไฟฟ้า
1. ควบคุมตำแหน่งของขากรรไกร
ตำแหน่งของขากรรไกรสามารถกำหนดได้โดยใช้มอเตอร์ที่เข้ารหัสและรูปแบบการควบคุมที่เหมาะสมตรงกันข้ามกับขากรรไกรแบบเดิมๆ มักจะจำเป็นต้องจับให้สุดเมื่อใช้มือจับไฟฟ้า ให้ใช้เฉพาะระยะห่างที่จำเป็นใกล้กับชิ้นส่วน จากนั้นจึงลดระยะให้เหลือน้อยที่สุดสวิตช์ชิ้นส่วนช่วยให้สามารถเลือกขนาดชิ้นส่วนได้หลากหลายขึ้น โดยไม่กระทบต่อรอบเวลาการผลิต
2. ควบคุมการยึดเกาะและความเร็ว
เนื่องจากกระแสของมอเตอร์เป็นสัดส่วนโดยตรงกับแรงบิดที่ใช้ จึงสามารถควบคุมแรงยึดเกาะที่ใช้ได้เช่นเดียวกับความเร็วในการปิดเช่น อาจช่วยเรื่องชิ้นส่วนที่เปราะบางได้
เวลาโพสต์: Dec-19-2022